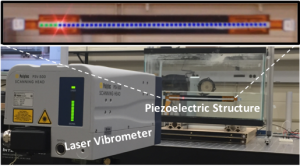
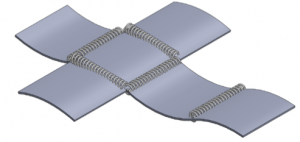
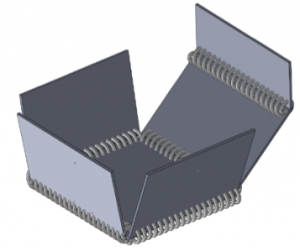
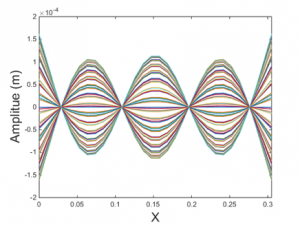
This project investigates a multi-scale biomimetic robot that can both swim to the target location and change shape for fulfilling its mission. The swimming of the robot is biomimetic and is achieved through undulation of the robot. The robot has the shape of an open box. Upon reaching its destination, the shape of the robot changes to a box. The boxes can collectively make a structure (a shelter for example) at the desired location. In medical robotics application, the box can be used for capturing of samples for biopsy. Undulation of the robot is achieved by using piezoelectric films connected to the flexible robot. A key problem that is addressed in this project is generation of biomimetic traveling waves over the flexible robot. Shape memory alloys and shape memory polymers, incorporated at the hinges of the robot, are utilized to change the shape of the robot from a flat shape to the box. This project investigates high fidelity fluid structure actuator interaction models to predict the mechanics of the robot and to be utilized in the motion controller.